LE SCHÉMA avec carte électronique et capteurs ILS
page1 - page2 - page3 - page4 - page5 - page6 - page7 - page8 - page9
Afin de pallier les difficultés rencontrées dans la solution précédente (essentiellement des décalages de voie d’arrivée), l’idée est de maîtriser la position du pont en ajoutant un capteur à chacune de ses positions. Une logique de comptage des impulsions issues de ces capteurs permet alors d’arrêter la rotation du pont lorsque la position de destination est atteinte.
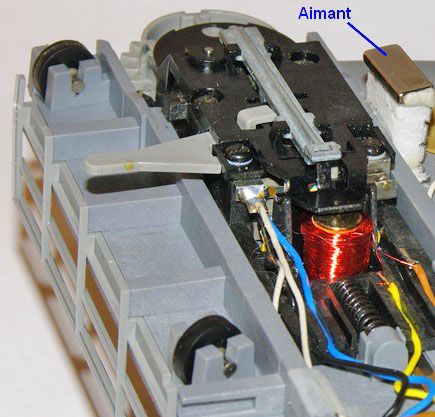
Le plus simple et le plus discret est d’installer des interrupteurs à lames souples (ILS, réf. Conrad 503878) (voir notice ![]() 66Ko) sous le pont (voir photo ci-dessous) et de coller un petit aimant (Ref. Conrad 503688) sur la partie mobile du pont à quelques mm du socle. Ainsi, lors de la rotation du pont, à chaque fois que l’aimant passe au dessus du capteur ILS (c’est à dire à chaque position), une impulsion est délivrée, comptée et le résultat du comptage est comparée à la valeur désirée pour arrêter la rotation.
66Ko) sous le pont (voir photo ci-dessous) et de coller un petit aimant (Ref. Conrad 503688) sur la partie mobile du pont à quelques mm du socle. Ainsi, lors de la rotation du pont, à chaque fois que l’aimant passe au dessus du capteur ILS (c’est à dire à chaque position), une impulsion est délivrée, comptée et le résultat du comptage est comparée à la valeur désirée pour arrêter la rotation.
Par rapport à la solution précédente, il subsiste :
- la commande des éléments de la plaque par des relais bistables (rien de changé ici) (Notice des relais bistables Roco 10019 ![]() (210 Ko),
(210 Ko),
- la préparation de la plaque identique (voir fin de la page 3, aucun changement là non plus),
- la possibilité de commander manuellement la plaque en actionnant le levier des relais.
L'interfaçage étant confié à une carte K8055 (réf. Conrad 191137, documentation téléchargeable page suivante), le principe général de la commande numérique devient le suivant :

- Le programme Windigipet envoie les commandes de la plaque tournante à l’Intellibox par la liaison série RS232. L’Intellibox les code en DCC et transmet les trames à un décodeur de loco. Les informations transmises par la trame DCC sont la position à atteindre, la polarité de la voie du pont et enfin la commande de marche-arrêt.
- Le décodeur de loco Zimo MX64 retransmet donc à la carte K8055 :
- la position à atteindre par la sortie de puissance moteur, en délivrant une tension proportionnelle à la position désirée
- la commande de polarité de la voie du pont par la sortie de fonction F1
- l’ordre de marche/arrêt par la commande des feux F0
- La carte K8055 reçoit aussi les impulsions en provenance du pont via des capteurs ILS pendant la rotation de celui-ci. Elle traite les informations d’entrée et génère les impulsions de commande des relais de sens de rotation, de polarité et de marche/arrêt.
- La carte K8055 est par ailleurs reliée à l’ordinateur par un port USB. Le programme de pilotage de l’ordinateur, qui fonctionne simultanément avec Windigipet, assure toute la logique de la relation Entrées/Sorties de la carte K8055 (voir programme téléchargeable page suivante, à titre d'exemple).
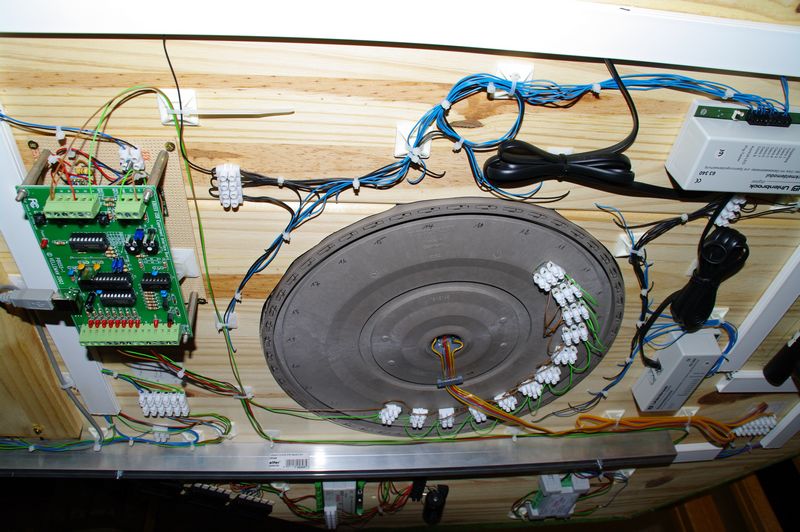
Photo de l'installation sous le pont (on distingue les dominos, collés par de la pâte adhésive, qui portent les ILS et sur la gauche, la carte électronique de commande) :
Le dessous de la partie mobile de la plaque dévoile le petit aimant.